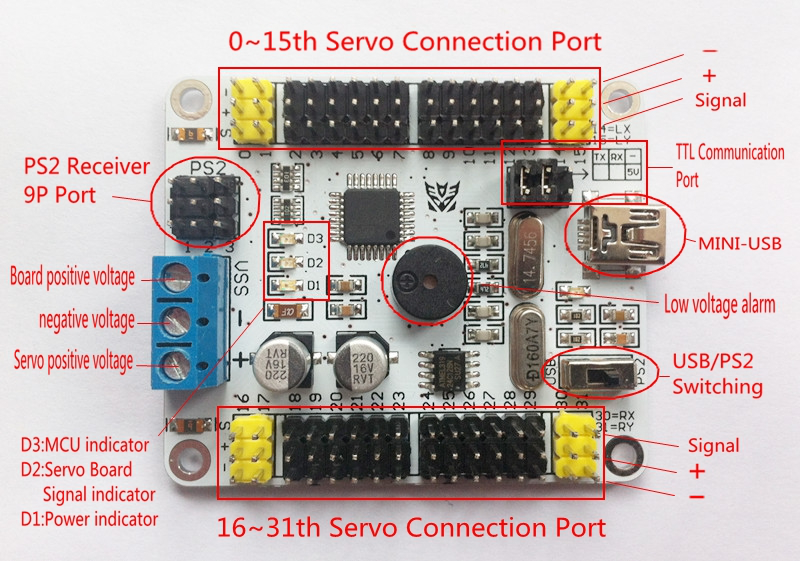
Serial Servo Controller (SSC)






The main objective of this repository (module), it is compile and have in only one place all the imformation required to use a SSC from computer, like design, software and other kind of things. also the propouse it's have code to manage servos.
TODOs
- Improve events management
- High level commands configuration &&
# Example
const robot = new Robot("commands.yaml");
robot.do('move-arm');
robot.do('stand-up');
## When commands.yaml is
defaults:
time: 0
commands:
move-arm: sequence of actions ... to-be-define maybe same to key-frames.json
stand-up: sequence of actions ...
...
# yep, you can configure with a file a robot and this provides high level commands
Draft - Video Tutorial
https://www.youtube.com/watch?v=YV9r7CbM9Zc
CP210x USB to UART Bridge Virtual COM Port (VCP) Drivers
Install this is required to have a way to control the SSC from computer https://www.silabs.com/products/mcu/Pages/USBtoUARTBridgeVCPDrivers.aspx
How Can I use this?
Install
$ npm i --global serial-servo-control
Show available devices (Serial Ports)
$ ssc devices
Show available examples
$ ssc list
Execute examples
$ ssc run open
$ ssc run interactive
$ ssc run sequence --input key-frames.json # JSON OR YAML files
# Sequence YAML File Example
# First executes pin "0" to pwm "500", after "2000" milliseconds from start
# Second executes pin "0" to pwm "2500" and pin "1" to pwd "500",
# after "4000" milliseconds from previus step
---
defaults:
time: 2000
keyframes:
-
time: 2000
actions:
0: 500
-
time: 4000
actions:
0: 2500
1: 500
Diagram
Robots that use SSC
Robo-Soul CR-6 Hexapod Robtics Six-legged 18DOF Spider Robot aliexpress

18DOF Aluminium Hexapod Spider 6Legs Robot Kit w/MG996R Servos ebay

9DOF LTR-4 Turtle Robot Four Feet Frame Kits + LD-2015 Servo aliexpress

6DOF Aluminium Clamp Claw Mount kit Mechanical Robotic Arm+Servo ebay

Contributions
Help me !!! we can create a great module. email me to sync (gary.ascuy@gmail.com) and let's do it, we can have a good module working together T^T)9